二軸モータドライバ TF-2MD3-R6
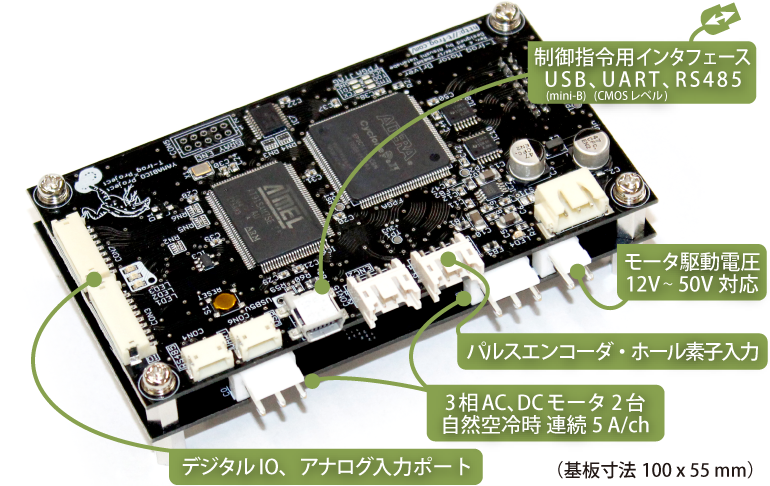
小型・大出力で移動ロボット制御に最適な、二軸ブラシレスDCモータドライバをご提供します。主な仕様は以下の通りです。(2013/06/24改訂)
- 対応モータ・台数
- 3相ACまたはDCモータ、2台
- 基板寸法
- 100 x 55 mm
- 通信インタフェース
- USB2.0 (mini-B)、UART (CMOSレベル)†1、RS485†2
- モータ駆動電圧
- 12V~50V対応
- 最大出力電流
- 自然空冷時 連続 5 A/ch†3 (ヒートシンク取り付けとコネクタ変更により 15 A/ch 程度まで対応予定)
- モータ制御用インタフェース
- パルスエンコーダ・ホール素子入力
- 入出力
- デジタルIO・アナログ入力ポートあり
- †1 2013年8月現在のファームウェアでは、UARTインタフェースはデバッグ用に使用しています。
- †2 2013年8月現在のファームウェアでは、RS485インタフェースからの制御は未対応です。
- †3 電源電圧24V、周辺温度25℃での概算値です。電源電圧、周辺温度、PWM周波数、モータの電気的特性などの条件により変化します。
本製品で駆動・制御できるモータ
本モータドライバは、2相パルスエンコーダ付きのDCモータ、2相パルスエンコーダおよびホール素子付きの3相ブラシレスモータを駆動・制御できます。2相パルスエンコーダ(A相、B相出力をもつもの)を搭載しないモータには、現在のところ対応していません。
価格・ご購入方法
部品供給難のため納期・価格ともに未定となっています
ご購入の前に必ずお読み下さい (2016/12/05追記)
- 本製品は、研究用途に使用する事を想定して設計・製造されており、製品に組み込んで使用することを意図しておりません (詳細は、免責事項を必ずご覧下さい)。
- 取り扱い上の注意、および、使用方法について、User's Manualを必ずお読み下さい。
- マニュアル3.3章に記載のとおり、電源ラインの本製品から近い位置に、モータの仕様に合わせて計算された容量のキャパシタを挿入する必要があります。これを怠ると、本製品が破損する場合があります。
- 本製品のファームウェアおよび、走行制御ソフトウェアYP-Spurは、オープンソースソフトウェアとして開発されています。これらは、2016年現在 東北大学助教の渡辺がボランティアで開発しており、全ての技術的サポートには対応いたしかねます。これらのソフトウェアは、現状のまま提供されるものとします (詳細は、各ソフトウェアのソースコードに含まれるライセンス条項をご覧下さい)。
- 本製品を用いてモータを制御する際には、モータおよびロボットの電気的・力学的パラメータを含む、パラメータファイルをお客様自身で作成して頂く必要があります。精度や応答性の高い制御を実現するため、必要なパラメータ数が多く、他の一般的なモータドライバと比較して設定が難しい点をご了承下さい。
お問い合わせ
- 二軸モータドライバ TF-2MD3-R6 のご購入は、ツジ電子までお問い合わせ下さい。

- 技術的なご質問は、モータドライバフォーラムにご投稿下さい。

- 動作がおかしいと感じたときは、まず、トラブルシューティングをご確認下さい。
ダウンロード
- モータドライバ TF-2MD3-R6 User's Manual (2017/10/17
更新)
- rev.6 修正点: ソフトウェア類のダウンロードURLの更新、誤植の修正
- 詳細な差分は、こちらをご覧下さい。
- ピン配置図 (2013/11/14 更新)
- Windows用デバイスドライバ
- ファームウェア
ツール
2013 copyright (c) T-frog Project All Rights Reserved.